tessellationrobot.github.io
Origami Tessellations Based Actuation
Have you ever thought - ‘How can the directional stiffness exhibited by origami tessellations be used to simplify the actuation of the locomotion of a laminate robot?’ We as a team are doing a research on this interesting topic. We hope that you too find the research interesting and participate with us by providing some feedback at the end.
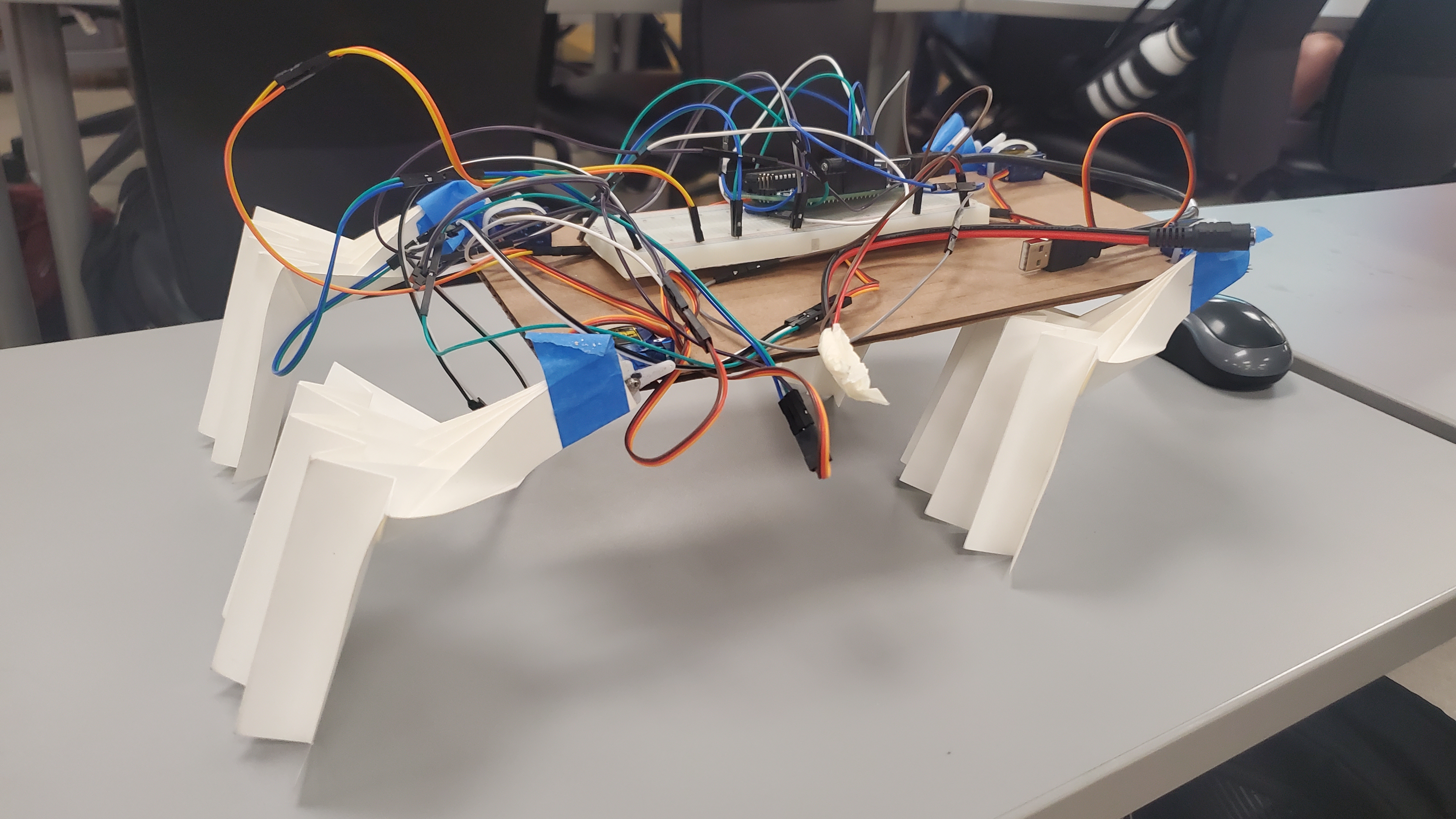
Straight Legged Robot
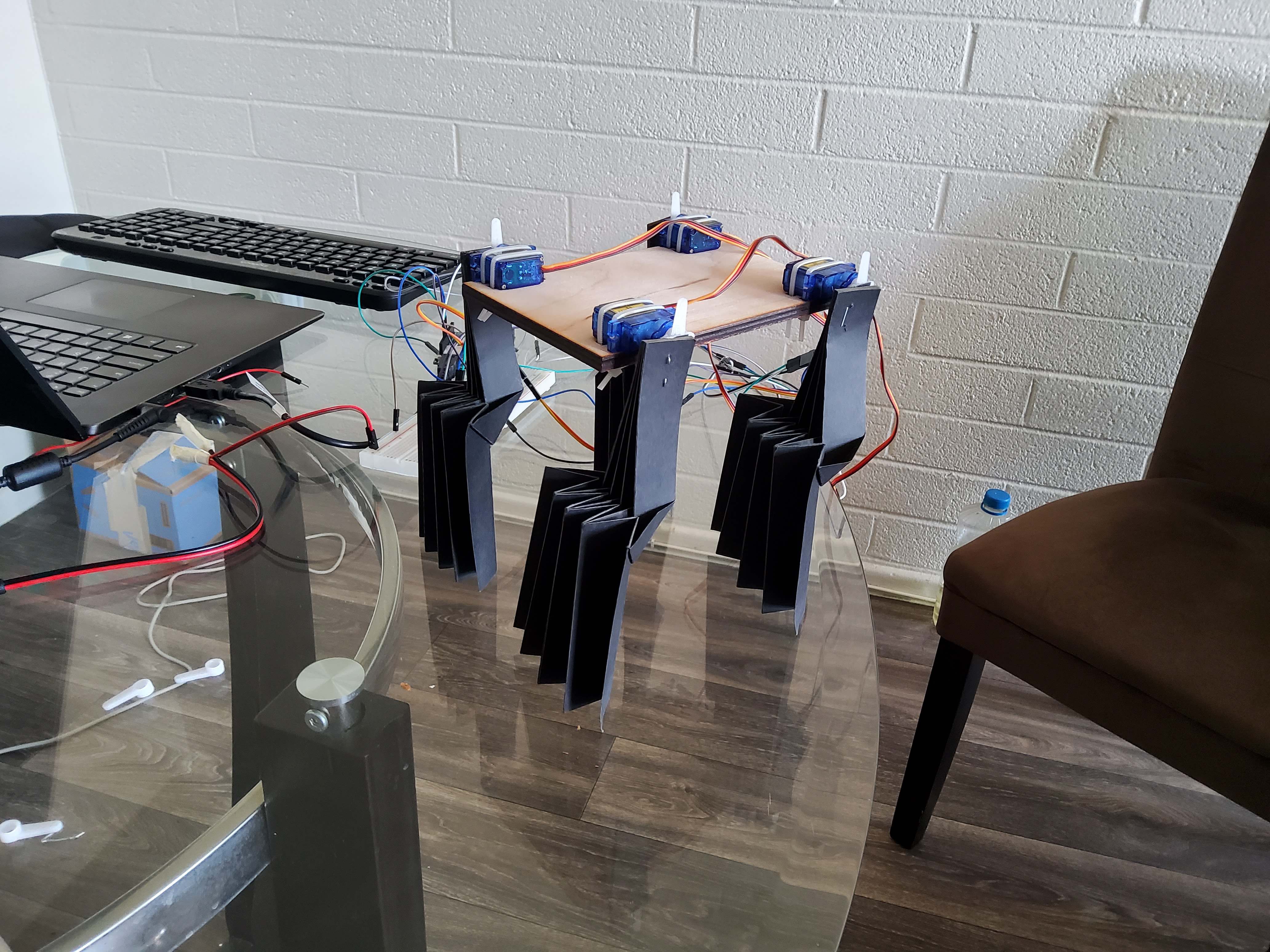
Angled Legged Robot
Introduction
Some origami tessellations such as the ‘snake skin’ tessellation exhibit an interesting property of directional stiffness. This means that as force is applied to the tessellation in one direction it easily flexes but when force is applied in the opposite direction the structure reaches a point at which it becomes rigid or stiff. This property could be used to allow for a work loop in a gait by only moving a limb forwards and backwards and allowing the directional stiffness to create the force difference needed for motion.
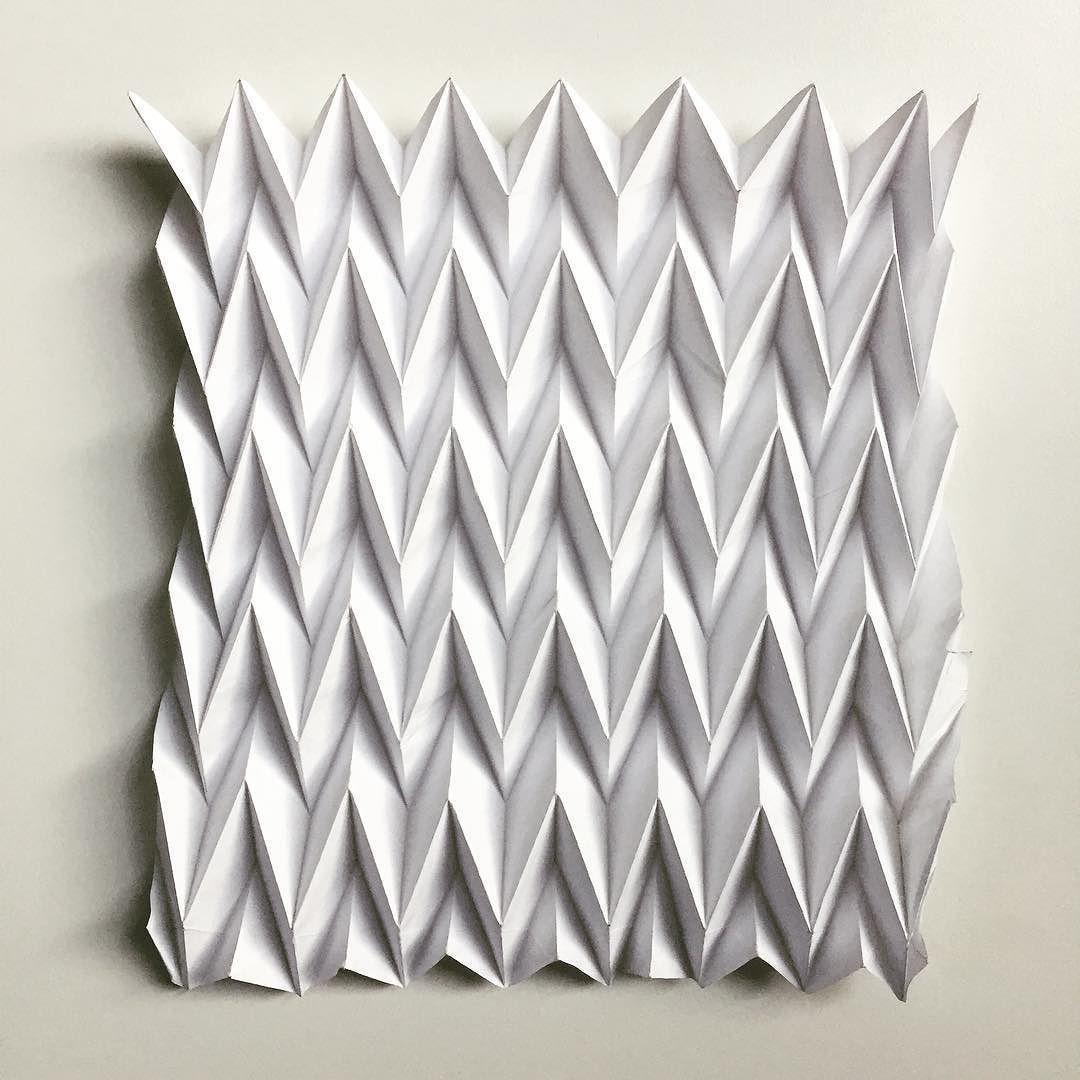
Snake Skin Origami Tessellation
Our Research Flow
(Click on individual links to read and learn more about it)
- Research Question
- Biomechanics Background and Initial Specifications
- System Kinematics
- System Dynamics
- Design and Manufacturing Workflow
- Design Optimization, Experiment Design, Data Collection and Analysis
Project Presentation
[Resources for downloading]
(Click on individual links to access particular data)
Team
Advisor - Prof. Daniel Aukes (daukes@asu.edu)
- Disha Vyas (dtvyas@asu.edu)
- Eric Feil (efeil@asu.edu)
- Manan Luthra (mluthra3@asu.edu)
- Meet Shah (mshah72@asu.edu)
Feedback
Submit your feedbacks by filling this form.