tessellationrobot.github.io
Biomechanics background and initial specifications
1. Identify a candidate organism you wish to focus on its biomechanics.
- List five of the most closely related research references on topics pertinent to your project, in IEEE format.
- Identify three citations which are most useful in creating initial specifications for your robot(use an asterisk in the previous list).
* [1] A. J. Parker and K. A. Clarke, “Gait topography in rat locomotion,” Physiology & Behavior, 14-Feb-2003. [Online]. Available: https://www.sciencedirect.com/science/article/abs/pii/0031938490902586. [Accessed: 12-Feb-2022]. This academic paper discusses the footfall patterns of the rat’s walking gait. It considers gender, age and stress along with some other parameters. The paper discusses a study between four different groups of rats which involves the comparison of the stride length, the stride width, and the weight between them. Additionally, this paper helped us in understanding the locomotion pattern of a rat. It also helped us in determining its average walking speed.
* [2] C. S. Howard, D. C. Blakeney, J. Medige, O. J. Moy, and C. A. Peimer, “Functional assessment in the rat by ground reaction forces,” Journal of Biomechanics, vol. 33, no. 6, pp. 751–757, 2000. This paper asks if the ground reaction forces of a walking rat can be used as a metric to measure the functional recovery of rat limbs after various repair techniques are applied to a severed nerve. The paper developed a method of measuring various ground reaction forces of walking rats and used this data to measure functional recovery in rat limbs after nerve injury repair. This paper provides useful information as it shows ground reaction force graphs of a walking rat.
[3] Andrada, Emanuel & J., Mämpel & Schmidt, André & M.S., Fischer & Karguth, Andreas & Witte, Hartmut, “Biomechanical analyses of rat locomotion during walking and climbing as a base for the design and construction of climbing robots”. WIT Transactions on Ecology and the Environment, 2010, vol.: 138, doi: 10.2495/DN100151.
* [4] Dvm, Artur & Md, Phd & Md, Phd & Bulas-Cruz, José & Filipe, Vítor & Melo-Pinto, Pedro & Varejão, Artur & Cabrita, António & Meek, Marcel & Bulas‐Cruz, José & Gabriel, Ronaldo & Melo‐Pinto, Pedro & Winter, David, “Motion of the foot and ankle during the stance phase in rats”, Muscle & Nerve, 2002, vol. 26, pp. 630 - 635, doi: 10.1002/mus.10242. This paper provides information on the movement of limbs (the foot and the ankle) of rats i. e. the ankle angle, reflecting plantarflexion and dorsiflexion during the stance phase of gait. With the help of multiple tests a research tool was developed which can help to analyze gait data that rely on the accurate determination of spatiotemporal foot events. This paper will be helpful to our research in drawing the Kinematic model (a rough model) of the body.
[5] Dienes, Jack & Hu, Xiao & Janson, Kevin & Slater, Conrad & Dooley, Emily & Christ, George & Russell, Shawn, “Analysis and Modeling of Rat Gait Biomechanical Deficits in Response to Volumetric Muscle Loss Injury”, Frontiers in Bioengineering and Biotechnology, 2019, vol. 7, doi: 10.3389/fbioe.2019.00146.
2. Search for existing bio-inspired robots based on the same animal, subsystem, and motion.
- List five of the most closely-related research references on topics pertinent to your project in IEEE format.
- Identify three citations which are most useful in creating initial specifications for your robot(use an asterisk in the previous list).
[6] F. Patane et al., “Biomechatronic Design and Development of a Legged Rat Robot,” 2007 IEEE International Conference on Robotics and Biomimetics (ROBIO), 2007, pp. 847-852, doi: 10.1109/ROBIO.2007.4522273.
* [7] S. Wang et al., “Design and Control of a Miniature Quadruped Rat-inspired Robot,” 2019 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), 2019, pp. 346-351, doi: 10.1109/AIM.2019.8868662. In this paper miniature quadruped rat-inspired robot is developed by using a compact control board which consists of a locomotion controller based on central pattern generators (CPG) and a particle swarm optimization (PSO) algorithm.The rat-inspired robot is able to implement three motion modes. first Crouch-standing action: the robotic rat is able to stand up from initial state (kneeling action) without manual support. Second Forward walking: the robot reaches a maximum speed of 10cm/s and third Turning action: the robotic rat has a small turning radius of 12 cm that is only half of its body length.This paper provides useful information about connecting rods mechanism, modular design method to simplify robot design and motion controller design for complex motion which provides different DOF to different body part of the robot.
[8] Q. Shi et al., “A Modified Robotic Rat to Study Rat-Like Pitch and Yaw Movements,” in IEEE/ASME Transactions on Mechatronics, vol. 23, no. 5, pp. 2448-2458, Oct. 2018, doi: 10.1109/TMECH.2018.2863269.
* [9] Lucas, Peer., “Design of a Biomimetic Rodent Robot”, 2019, doi: 10.14459/2018md1464578. This paper describes the design of a modular, low cost,untethered, easy to use and simple to produce biomimetic robot created to mimic the size and locomotion of a common rat.It has a compliant leg design based on tendon-driven actuation It provides simple locomotion patterns like trotting forward, backward and turning left and right.This paper shows pantograph leg design allowing a slim leg design using springs which introduces elasticity into the system, which enables the legs to adapt to impacts and different surfaces like real rat which will be useful for our project.
* [10] C. Laschi et al., “Design and Development of a Legged Rat Robot for Studying Animal-Robot Interaction,” The First IEEE/RAS-EMBS International Conference on Biomedical Robotics and Biomechatronics, 2006. BioRob 2006., 2006, pp. 631-636, doi: 10.1109/BIOROB.2006.1639160. In this study a real rat and the robotic rat were placed in a small square field installed with a lever and a food feeding machine to conduct an interaction experiment to study the capability of the robotic rat to teach the real rat pushing the levers as the robotic rat is programmed to accomplish tasks for reaching food and water in the experimental set-up,the purpose of this study is to understand if and to what extent the real rat imitates the actions of the robotic rat.This paper provides information about the mechanical design and development of bio inspired rat robot.
Additional references:
[11] Clark KS, Coleman C, Shelton R, Heemstra LA, Novak CM, “Caffeine enhances activity thermogenesis and energy expenditure in rats”, Clin Exp Pharmacol Physiol,, vol 46, no. 5, pp. 475-482, 2019 doi: 10.1111/1440-1681.13065. In this study rats were on an enclosed level treadmill moving at a constant 7m/min speed for 25 minutes. The treadmill was inside a closed box that allowed for gas composition measurements to be taken in order to determine the rat’s energy expenditure. This study sought to determine if caffeine would affect the energy expenditure rates of the rats walking. This paper provides useful information about rat energy expenditure when walking as measured experimentally.
[12] Witte H, Biltzinger J, Hackert R, Schilling N, Schmidt M, Reich C, Fischer MS, “Torque patterns of the limbs of small therian mammals during locomotion on flat ground”, J Exp Biol, 2002 May, vol. 205, no. 9, pp. 1339-53
3. Collect all the information you have found from your references into one place.
Examples of the types of information to include:
- Typical mass of the animal as a whole, and of key anatomical parts
- Average speed of the animal.
- Key points in a stride: leg motion such as stride length and maximum foot height, trunk motion and orientation, etc.
- Typical ground reaction forces during locomotion(plot is best)
- Metabolic energy/power consumed to locomote (respiration).
- Mechanical energy/power generated during locomotion
- Key biological materials and their mechanical properties (bone, ligaments, tendons, and the resulting link/joint stiffnesses and damping properties)
- Muscle forces
4. Fill in the information gaps from your biomechanics investigation with informed assumptions you can make. For example, if you know ground reaction forces from your paper, and some masses, try to find peak accelerations. If you know forces and velocities, calculate power usage. If you know maximum jump height and mass, find energy required for a jump. The most important pieces of information you can gather at this point are elements like “how much energy is consumed in accomplishing this gait”, “What are the forces involved”, etc.
| Parameter | Unit | Value Range | Reference |
|---|---|---|---|
| Total mass | kg | 0.25-0.40 | [2][3][4][9] |
| Average speed walking | m/s | .20-.60 | [1][5][4] |
| Stride length | cm | 9-16 | [1] |
| Stride width | cm | 2-4 | [1] |
| Metabolic powerwalking | W | 3.08 +/- .26 @.116 m/s | [11] |
| Peak walking ground reaction | N | 2.5-3 | [2] |
| Stance phase duration | s | .150-.400 | [4] |
| Body length | cm | 17-21 | [9] |
| Tail length | cm | 20-23 | [9] |
5. Supply at least two figures from literature, highlighting key aspects of the biological system. This should include one from each of the following categories:
- Figures/drawings of skeleton, anatomy, exoskeleton, body plan, musculature, kinematics
[10]
[5]
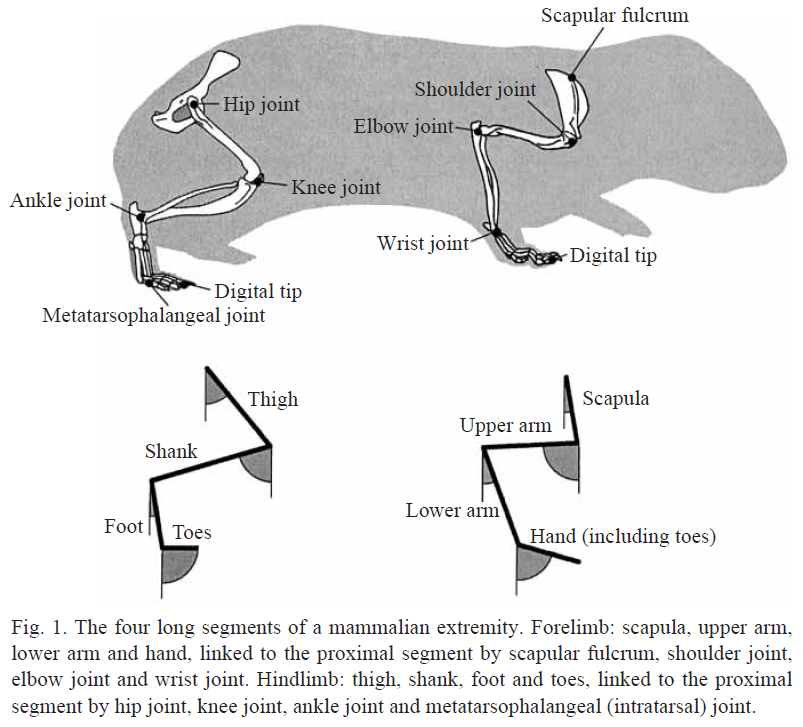
[12] This figure shows the skeletal structure of the fore and hind limbs of a rodent alongside a simplified model of the structure modeled as hinged beams.
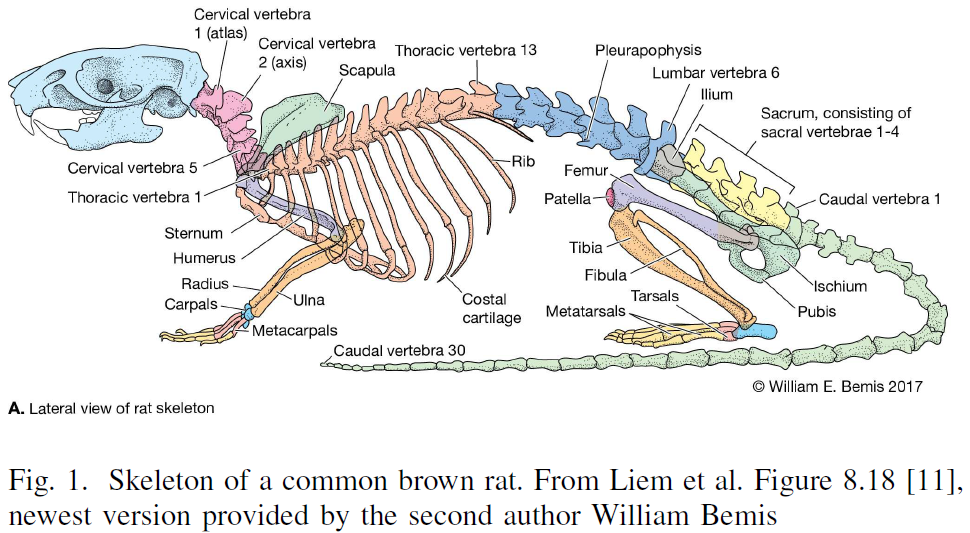
[9] This figure shows a side view of the rat skeletal structure. Note the varying orientation of leg knee joints on the front and rear legs.
- Motion plots, freeze frames of gait cycle, plot of ground reaction forces
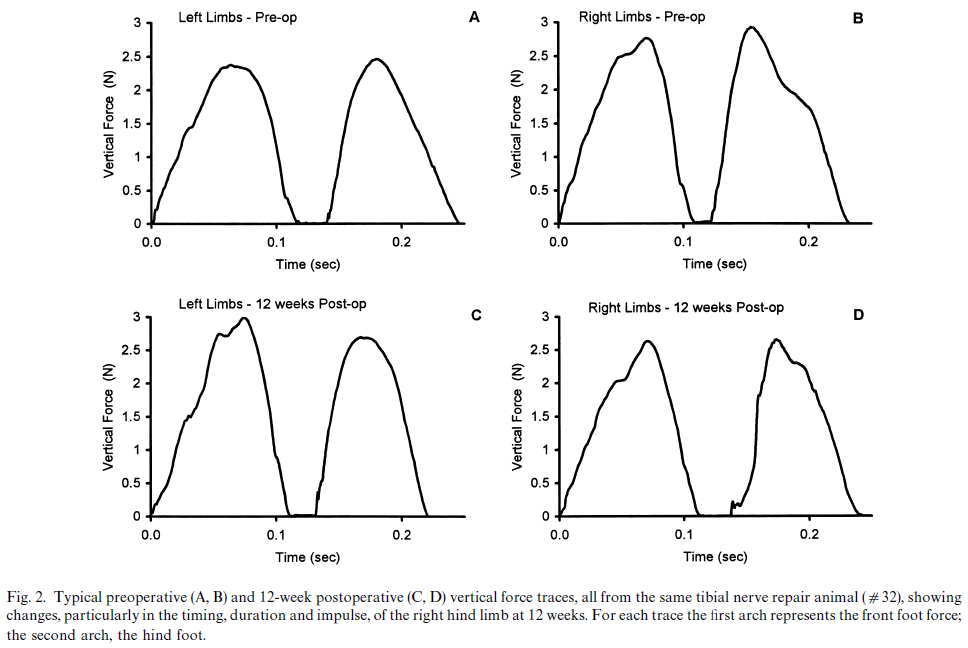
[2] This figure shows the vertical ground reaction forces of a rat of about 280g mass walking on level ground. Of interest to us are the top two force graphs which show the force curves for the right and left feet. This shows that all limbs of the rat exert similar vertical forces on the ground and do so in a similar manner.
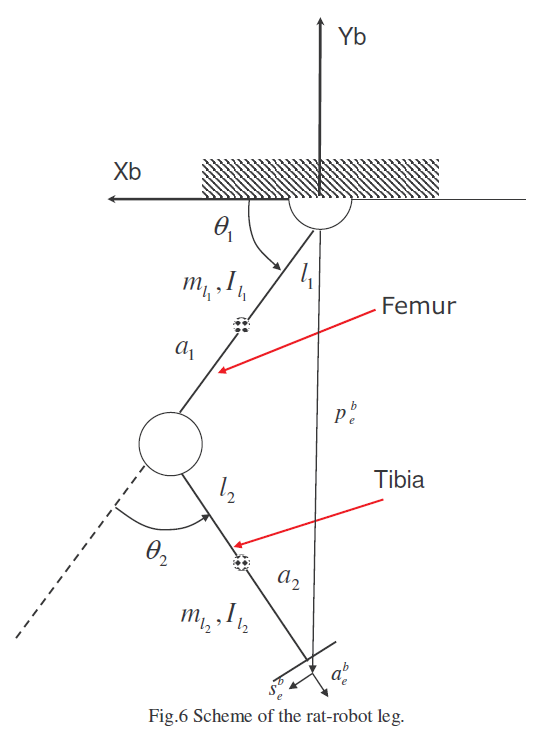
6. Draw the simplest engineering representation of the system you can of your proposed mechanical system. How many rigid bodies are there? How many can be approximated as massless (1/10 of the total mass or less)? Where are the springs? Where is the (main) actuator?

Model of a single leg as two beams with a joint and spring between them. There is an end stop that limits the motion of the second leg element and prevents it from moving past a certain angle with respect to the beam connected to the motor. The leg system is actuated by the one motor which controls the rotation of the beam it is attached to.

This is a side view of the robot system. There are 9 rigid bodies in the model, two for each of the four legs and one for the robot’s main body which will hold the 4 motors and battery. With the repositioning of the battery the robot’s center of gravity will be adjusted so that it is midway between the front and back legs. The legs are expected to have low mass compared to the body of the robot and can thus be modeled as massless in order to simplify the model.
Discussion
1. Discuss / defend your rationale for the size animal you selected in terms of your ability to replicate key features remotely with limited material selection.
We believe that the rat is a reasonably sized animal for us to use as bioinspiration for our robot. The mass range of .25-.4 kg is not unreasonable for our robot given the low mass of paper laminates. The body length of 17-21cm for larger rats is similar to the size of the robot we plan to build in order to address our research question. Due to the use of tessellation elements in the robot’s legs the width of our robot will likely end up wider than the width of a rat. However the difference should not be so large as to make the straight line walking mechanics of the robot significantly different from those of a rat. We believe that the rat is a good candidate for bioinspiration of our robot as it is not too large or small for us to replicate with laminate construction techniques.
2. Find a motor and battery that can supply the mechanical power needs obtained above. Consider that motor efficiencies may be as high as 95%, but if you can’t find it listed, assume you find a more affordable motor at 50-70% efficiency. Compare the mechanical watts/kg for the necessary motor and battery vs the animal’s mechanical power/mass above? Which one is more energy dense?

SG90 Servo Motor The SG90 servo motor has a rated torque of 1.7kg-cm. This means that it can handle a maximum load of 17N at one centimeter from the sero axle. In addition to this, the operating DC voltage of this motor ranges from 4.8 to 6V. Considering the typical operational voltage to be 5V and a current consumption of 250mA during movement, a single motor would require a power input of 1.25W. For a 4 limbed robot this would be a peak power draw of 5W. Assuming a 65% efficiency this would result in a motor mechanical power output of 3.25 W close to that of a rat.</br>
Efficiency of the servo = Output Mechanical Power/Input Electrical Power
Battery Specifications https://www.digikey.com/en/products/detail/adafruit-industries-llc/328/5054542
Considering the mass of the rat to be 400g (refer to information in the table)
Watts/Kg (rat): 3.08/0.40